A estabilidade dinâmica de cadeiras de rodas motorizadas
Redação
Muitas pessoas com deficiência física optam por utilizar cadeira de rodas motorizadas devido ao grau de comprometimento da mobilidade. Esse equipamento é ideal para o alcance da maior independência, já que possui motor e faz a cadeira de rodas se locomover sem que o usuário necessite de ajuda ou gaste sua força e energia para empurrar o equipamento. A motorização de uma cadeira de rodas, normalmente, integra três elementos: motor, freio e transmissão. Inúmeras são as funções e aspectos ligados a esse componente e, por isso, é importante que o usuário esteja por dentro de como a motorização funciona para poder verificar o seu bom desempenho. Deve-se entender que existem métodos de ensaio para determinação da estabilidade dinâmica de cadeiras de rodas motorizadas.

O controle de direção de uma cadeira de rodas motorizada é, na maioria das vezes, feito por variação de velocidade entre as rodas, assim como acontece em uma cadeira de rodas manual. Por esse motivo, as cadeiras de rodas motorizadas sempre possuem dois motores, um para cada roda. O controlador eletrônico faz o comando de forma independente desses dois motores.
Para se movimentar em linha reta, por exemplo, ambos motores se movimentam no mesmo sentido de rotação e mesma velocidade. Caso o usuário queira que a cadeira dobre, a sua velocidade será reduzida e os motores passarão a girar em mesma direção e sentido, porém, com velocidades diferentes. É possível girar 360º sobre o próprio eixo, sem que ocorra descolamento, por exemplo, girando os motores na mesma velocidade, porém em sentidos opostos.
A transformação de energia elétrica em mecânica, através de dois motores de corrente contínua, é o princípio de funcionamento da cadeira de rodas motorizada. Para que a motorização tenha o correto desempenho, é preciso que o motor tenha uma potência ideal para que execute o bom trabalho de locomoção. A potência é uma importante característica do motor. É ela que vai determinar a capacidade de carga, velocidade máxima, capacidade de vencer obstáculos, como subidas, e o consumo de energia. Contudo, o motor nunca fará o trabalho sozinho, pois, se o usuário ultrapassar obstáculos, deve ser observado, além da potência do motor, as características físicas da cadeira de rodas.
As cadeiras com pouca distância livre do solo, por mais que tenham motores potentes, não conseguirão transpor obstáculos muito altos, pois poderão bater no piso com mais facilidade. A potência é um elemento muito valorizado pelos usuários de cadeira de rodas motorizada, principalmente porque relaciona com a velocidade máxima do veículo.
Em média, uma pessoa caminhando rápido atinge 6,5 km/h. Mesmo com motores menos potentes, uma cadeira de rodas motorizada chega nessa velocidade facilmente. Mas se o usuário desta cadeira de rodas quer que proporcione uma velocidade maior, a potência do equipamento deve ser observada com mais atenção.
Os motores com grandes potências costumam gastar mais energia e isso acaba impactando na autonomia geral da cadeira de rodas. Para compensar essa escolha deve-se instalar baterias com capacidades maiores. Contudo, causará maior peso no equipamento.
Muitas vezes, o aumento da potência e, consequentemente, da capacidade das baterias, pode resultar em um sistema menos eficiente. Por conta do peso das baterias, a cadeira de rodas ficará ainda mais pesada para se locomover e isso fará com que gaste mais energia.
As cadeiras de rodas com motores de potência mais baixa, normalmente, são mais eficientes que as que usam motores de potência mais alta devido a esse aspecto. Isso não é uma regra e nem sempre tem impacto significativo no desempenho. É preciso ter em mente que essas condições devem ser levadas em conta no momento da escolha do produto. É preciso que o usuário entenda que há um limite, e que dependendo do aumento da potência, pode não resultar no bom desempenho da cadeira de rodas motorizada.
Em resumo, a escolha da cadeira de rodas, seja manual ou motorizada, deve levar em conta o potencial motor do paciente, suas necessidades dentro da comunidade e condições socioeconômicas. A adequação postural irá intervir na escolha do modelo da cadeira, no controle da postura e na administração das deformidades de modo a adequar o paciente possa deslocar-se com independência, conforto e segurança.
Os indivíduos com incapacidades graves que não podem andar ou até mesmo sentar sozinhos, podem passar a vida deitados ou sendo carregados, por esse motivo os profissionais lançam mão do uso da cadeira de rodas. Para muitos, a cadeira de rodas é um estigma de incapacidade e dependência, porém a liberdade de ir e vir está diretamente relacionada à melhor qualidade de vida e maior independência.
O mau posicionamento na cadeira de rodas pode levar o indivíduo a ter problemas como: rigidez, contraturas, deformidades, restrição do movimento, úlceras de pressão além de comprometer o desenvolvimento emocional e intelectual. O bom posicionamento do indivíduo na cadeira de rodas aumenta a mobilidade, autonomia, conforto e segurança levando a uma melhoria na postura sentada favorecendo funções básicas como respiração, nutrição e fluxo sanguíneo, previne dores e, além disso, melhora a sociabilidade.
O sucesso na prescrição da cadeira de rodas depende de vários fatores como: expectativa do usuário, adequação do ambiente tanto físico como social e da cooperação da família. Os componentes da cadeira de rodas devem objetivar conforto e manutenção da postura, para isso os elementos que compõe a cadeira de rodas não devem ser eleitos de forma aleatória, pois se assim for esse meio de locomoção se converte em uma trava à autonomia, incômodo ao usuário, prejudicando sua independência e interação com o meio.
Para o processo de adaptação da cadeira de rodas pode ser necessária a utilização de alguns equipamentos como: cinto de segurança, apoio dos pés, abdutor de membros inferiores, encosto, mesa de apoio, apoios laterais para tronco, apoio de cabeça, bloqueadores de joelhos, protetor sacral entre outros.
No que se refere à adequação postural nas doenças neuromusculares, a maioria delas causa perdas motoras e funcionais significativas e o aparecimento de deformidade é incontrolável. Em consequência, a intervenção da adequação postural deverá possibilitar frequentes ajustes e reajustes. Num primeiro momento existe o controle cervical, o controle de tronco está presente ou instável, não há deformidades instaladas, mas o paciente pode apresentar posturas compensatórias (escoliose).
Nessa fase, o assento plano com base rígida e de densidades diferentes é utilizado para obter o posicionamento adequado, favorecendo melhor acomodação da pélvis. O apoio lateral de tronco em dois pontos tem a intenção de proporcionar suporte adequado, quando o controle de tronco for insatisfatório e corrigir posturas compensatórias.
O cinto de segurança é um recurso adicional para auxiliar na estabilidade de tronco. O apoio de cabeça removível é útil quando há necessidade de longa permanência na posição sentada ou durante a locomoção do paciente em terrenos acidentados. O cavalo de abdução é utilizado para o alinhamento dos membros inferiores, quando o paciente apresentar adução, e o apoio lateral para as coxas será de utilidade para quando há tendência à abdução.
Em estágios mais avançados da doença o objetivo maior da adequação postural é o conforto. Assento e encosto são moldados para garantir a acomodação do paciente e a distribuição do peso corporal de maneira uniforme. As deformidades já estruturadas são apenas absorvidas e acomodadas.
Enfim, a adequação postural é única, pessoal e para cada necessidade patológica. Ela deve analisar a estabilidade, função e conforto de cada usuário, prevenindo, auxiliando ou ainda corrigindo deformidades e posturas inadequadas, deve agregar qualidade de vida ao paciente e promover uma maior inserção social desse. Assim sendo um dispositivo adequadamente prescrito é capaz de desfazer a histórica associação entre o uso de uma cadeira de rodas com a incapacidade e a invalidez de seu usuário.
A NBR ISO 7176-2 de 05/2020 - Cadeiras de rodas - Parte 2: Determinação da estabilidade dinâmica de cadeiras de rodas motorizadas especifica os métodos de ensaio para determinação da estabilidade dinâmica de cadeiras de rodas motorizadas. Este documento é aplicável às cadeiras de rodas motorizadas, incluindo scooters, com uma velocidade máxima nominal que não exceda 15 km/h, destinadas a transportar uma pessoa. Este documento não se aplica às cadeiras de rodas manuais com kits de motorização adicional usados para propulsão ou como auxílio à propulsão.
É importante compreender as características de estabilidade dinâmica de uma cadeira de rodas para fins de indicação de modelo e ajustes. Convém que aqueles que prescrevem o modelo e os usuários de cadeiras de rodas compreendam as implicações da estabilidade dinâmica sobre a segurança, particularmente ao ajustar sistemas de assento que oferecem uma grande variação de configurações. Convém que eles avaliem o ambiente em que a cadeira de rodas será utilizada e os potenciais perigos deste ambiente ao considerar as possíveis configurações da cadeira de rodas quando se encontrar com tais perigos.
Este documento especifica ensaios para estabilidade dinâmica sob uma faixa de condições de operação com várias configurações de cadeira de rodas. A eficácia do sistema de controle de estabilidade é avaliada pelos procedimentos listados neste documento. A instabilidade de cadeiras de rodas contribui significativamente para acidentes, causando lesões. Consequentemente, é desejável que todas as partes envolvidas no fornecimento de cadeiras de rodas compreendam os fatores que contribuem para a instabilidade.
As partes interessadas neste documento podem ser projetistas e fabricantes de cadeiras de rodas, aqueles que prescrevem o modelo, terapeutas, projetistas de edificações, prestadores de instalações públicas e estabelecimentos de ensaio. A finalidade deste documento é definir ensaios que demonstrem consistentemente os limites de estabilidade dinâmica sob uma variedade de desafios de estabilidade comprovados. Os ensaios são projetados para revelar os efeitos dos ajustes e configurações.
Este documento ajudará as partes interessadas a definir os ambientes e a utilização destinada adequados da cadeira de rodas. Embora este documento não especifique requisitos, trata-se de um documento de referência essencial para outros documentos que de fato especificam estabilidade. A cadeira de rodas é submetida a um número de ensaios de condução, simulando a utilização de uma cadeira de rodas, enquanto seus movimentos são observados quanto à ocorrência de uma gama de condições de instabilidade especificadas. Os acessórios não são levados em conta durante estes ensaios.
Como aparelhagem para os ensaios, usar uma superfície plana de ensaio, horizontal, reta e rígida, com coeficiente de atrito maior que 0,6, medido pelo método especificado na NBR ISO 7176-13 e com tamanho suficiente para conduzir os ensaios. O plano de ensaio deve possuir uma superfície que se assente entre dois planos horizontais imaginários, separados por 20 mm, e que possua não mais que 0,5 ° de variação em inclinação ou inclinação transversal ao longo do ensaio. A superfície plana de ensaio deve ser longa o bastante para permitir que a cadeira de rodas atinja a velocidade máxima.
Uma área de aproximadamente 10 m × 3 m normalmente é de tamanho suficiente, mas o ensaio de cadeiras de rodas maiores e/ou mais rápidas pode precisar de um plano de ensaio maior. A área inclinada, reta e rígida, com subida e descida, deve ser longa o bastante para permitir que a cadeira de rodas alcance a velocidade máxima e pare dentro da inclinação declarada. A área de ensaio da rampa deve ser longa o bastante para permitir que a cadeira de rodas pare dentro da inclinação declarada, a qual deve estar dentro da tolerância de ±1°.
A área de ensaio da rampa deve ter uma superfície que se assente entre dois planos paralelos imaginários, separados por 50 mm. A rampa de ensaio deve possuir um coeficiente de atrito na área de ensaio que atenda aos requisitos da NBR ISO 7176-13. A área de ensaio deve seguir imediatamente o plano de ensaio horizontal por uma transição com um raio de menos de 25 mm. A superfície percorrida deve ser livre de materiais soltos e degraus maiores que 5 mm de altura.
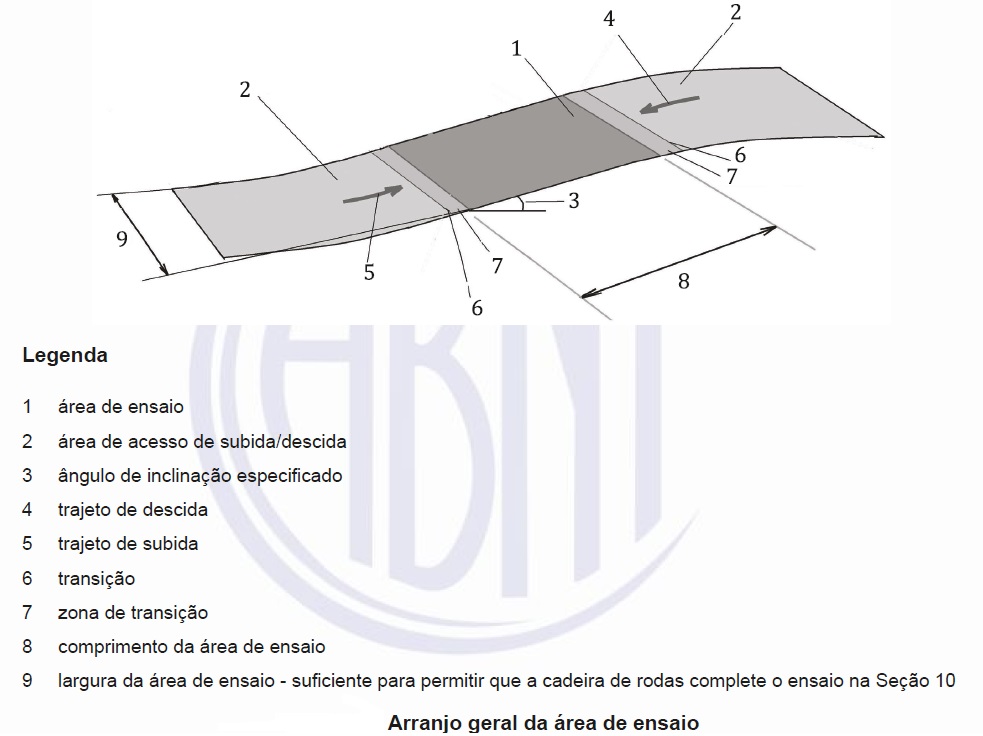
Uma rampa de aproximadamente 10 m × 3 m normalmente é de área suficiente, mas o ensaio de cadeiras de rodas maiores e/ou mais rápidas pode precisar de uma rampa maior. A rampa pode permitir ângulos variáveis ou pode haver rampas individuais para cada ângulo requerido. As áreas de acesso de subida e descida em qualquer extremidade da área de ensaio não precisam atender aos critérios acima. A figura abaixo fornece uma configuração recomendada para a área de ensaio e transição. Uma rampa de aproximadamente 10 m × 3 m normalmente é de área suficiente, mas o ensaio de cadeiras de rodas maiores e/ou mais rápidas poderia precisar de uma rampa maior.
Deve destacar que a transição de degrau vertical rígido, com as seguintes propriedades: imediatamente adjacente a um plano de ensaio horizontal e seguida por mais um plano horizontal sobre o qual uma cadeira de rodas possa ser conduzida por degrau a partir do plano de ensaio horizontal; alturas de degrau de 15 mm, 25 mm, 50 mm e múltiplos de 25 mm acima disso, caso declarado pelo fabricante; aresta superior do degrau com um raio de 6 mm ± 1 mm; a tolerância para a altura total do degrau deve ser de ± 2 mm. Pode ser tanto um único degrau com altura ajustável quanto diferentes degraus fixos.
Uma área de aproximadamente 1 m × 5 m normalmente é de tamanho suficiente para o plano superior. O boneco de ensaio deve ser de acordo com a NBR ISO 7176-11. Podem ser usados meios para controle remoto, para uso a critério da equipe de ensaio, para controlar a velocidade da cadeira de rodas e para fazer uma curva em 90° em um raio predeterminado. Exemplo: para cadeiras de rodas controladas por joystick, uma aparelhagem de controle remoto com servomotores proporcionais para controlar os movimentos para frente/para trás e laterais do joystick (ver Anexo A).
Outro exemplo: para cadeiras de rodas dirigidas por guidão, um servomotor proporcional controlado remotamente para o controle da velocidade e uma mola de carga com liberação por controle remoto para o guidão, de modo que, quando o guidão for liberado, a mola faça com que o guidão vire em um raio predeterminado (ver Anexo A). Para ensaios que requeiram um raio de curva variável, o cabo de direção pode ser substituído por um atuador. Alternativamente, um dispositivo para limitar a rotação do guidão a ângulos de curva predeterminados pode ser utilizado.
Deve-se preparar a cadeira de rodas de ensaio de acordo com a NBR ISO 7176-22, ajuste de nível 2, modificado conforme especificado em seguida em dispositivos antitombo. Deve-se submeter a cadeira de rodas a ensaio com dispositivos antitombo, caso estes sejam fornecidos e as instruções de uso afirmem que devem ser utilizados. Se os dispositivos antitombo forem ajustáveis, ajustá-los em sua posição menos eficaz.
Caso possam ser ajustados de modo que não toquem no chão se a cadeira de rodas tombar, esta deve ser considerada a posição menos eficaz. Caso não sejam fornecidos dispositivos antitombo, ou caso as instruções de uso não afirmem que devem ser utilizados, submeter a cadeira de rodas a ensaio sem os dispositivos antitombo.
A cadeira de rodas deve estar equipada com baterias conforme especificado pelo fabricante. Entretanto, baterias que contenham eletrólitos livres podem ser perigosas, caso ocorra derramamento durante os ensaios. Tais baterias podem ser substituídas por baterias reguladas por válvulas equivalentes com capacidade mais próxima, de fibra de vidro absorvente (AGM) ou tipo gel, com pesos suplementares, caso necessário, para proporcionar uma distribuição de massa equivalente.
Selecionar a carga de ensaio e ajustá-la conforme especificado a seguir. Para o boneco de ensaio, selecionar, posicionar e firmar o boneco adequado de acordo com a NBR ISO 7176-22. Preparar os meios de controlar remotamente a cadeira de rodas, se um sistema de controle remoto tiver sido escolhido. Se estiver usando controle remoto, preparar os meios (ver o Anexo A).
Para alguns ensaios, pode ser necessário utilizar um ocupante humano. Para tais casos, selecionar um ocupante humano adequado conforme especificado na NBR ISO 7176-22 e ver o Anexo B para recomendações de segurança. Conduzir os ensaios especificados nas Seções 8, 9 e 10 usando o sistema de pontuação especificado no Anexo C para quantificar a reação dinâmica da cadeira de rodas. Sempre que aplicável, realizar o ensaio utilizando um boneco de ensaio conforme especificado. Quando não for possível utilizar um boneco de ensaio, utilizar um ocupante humano.
Por razões de segurança, realizar cada ensaio inicialmente a baixa velocidade e repetir utilizando velocidades aumentadas gradualmente até que uma pontuação de 0 ou a velocidade máxima sejam atingidas. Os ensaios podem ser realizados em qualquer ordem. Caso a pontuação de estabilidade seja 1 ou 0 para uma inclinação ou altura de degrau em particular, terminar o ensaio e registrar 0 para os níveis mais altos para este ensaio.
A continuação do ensaio pode ser perigosa para o operador do ensaio e prejudicial para a cadeira de rodas. Registros de vídeo do movimento da cadeira de rodas, reproduzidos em câmera lenta e quadro a quadro, podem auxiliar na observação e pontuação das reações da cadeira de rodas. A fim de controlar a cadeira de rodas, é recomendado um sistema de controle por rádio, como os utilizados em modelos controlados por rádio.
Os servomotores para essas unidades possuem baixa massa e não são caros. São necessárias modificações mínimas à cadeira de rodas para acomodar os servomotores. O método de preparação é determinado pelo método de direção da cadeira de rodas, ou seja, controle por joystick ou controle por guidão (tipicamente utilizado para scooters).
Selecionar e acomodar um boneco de ensaio em conformidade com a NBR ISO 7176-11, conforme especificado na NBR ISO 7176-22. Registrar a massa de boneco selecionada. O joystick pode ser controlado por dois servomotores em um suporte afixado ao módulo do joystick e movendo o joystick para frente/para trás e lateralmente. Cadeiras de rodas utilizando um mecanismo de guidão possuem uma mola de extensão carregada encaixada a uma manopla do guidão. A manopla oposta fica amarrada por um cabo flexível para permitir que a cadeira de rodas se desloque em linha reta.
O cabo flexível é liberado por um servomotor, permitindo que a mola vire o guidão. Detentores predefinidos acrescentados ao mecanismo de direção determinam o raio de curva. Outro servomotor é equipado para controlar a velocidade. Um terceiro servomotor é recomendado para ajustar o aparador da direção para permitir que a cadeira de rodas se desloque em uma linha reta.

Hayrton Rodrigues do Prado Filho
Artigo atualizado em 13/08/2025 03:38.